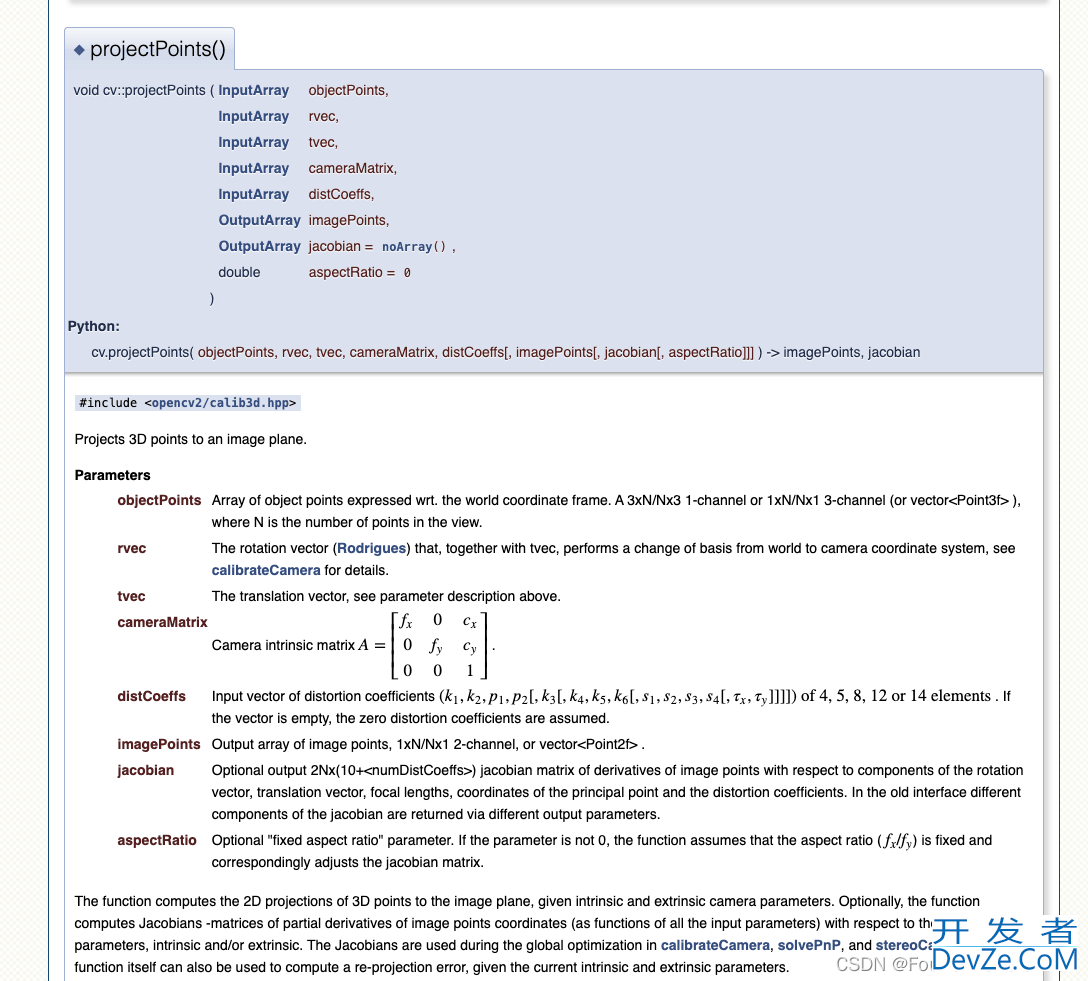
我们先看一下c++ 中的参数解释 第一个输入的点是一个, (N, 3) 维的 三维坐标系中的点, xyz第二个是旋转向量,第三个是平移向量.第四个是相机内参,第KrgZyewB五个是相机的畸变系数, 如果输入是4个时, 就是[k1, k2, p1
I\'d like to stop IE8 from sharing my sessions in one of 开发者_运维知识库two ways (or both if possible):
This question already has an answer here: Make openGL lines connected (1 answer) 开发者_JAVA百科 Closed 9 years ago.
 加载中,请稍侯......
加载中,请稍侯......